Em um mundo cada vez mais tecnológico, sistemas de controle desempenham um papel crucial em várias indústrias, desde a indústria automotiva até a aeroespacial. Torna-se essencial a necessidade de sistemas de controle confiáveis e precisos, e a técnica de teste, conhecida como Hardware-in-the-Loop (HIL), surgiu como um pilar fundamental no desenvolvimento e validação desses sistemas complexos.
Acredita-se que a técnica de Hardware-in-the-loop surgiu na indústria aeroespacial, em projetos e testes de complexos sistemas de voo. Desde então, seu uso tem crescido e se expandido para outros segmentos, como o automotivo e o industrial.

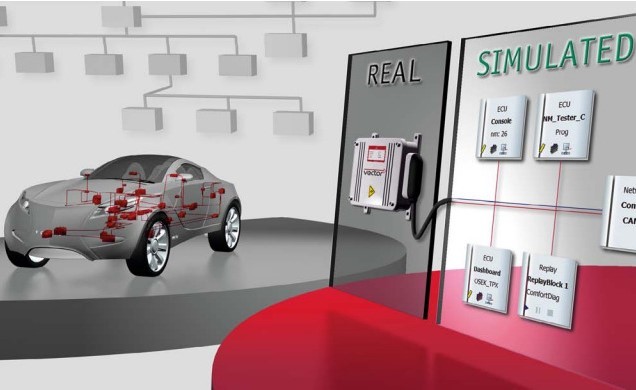
Fig. 1 – Ilustração de hardware-in-the-loop (HIL) – Fonte: NI.
O HIL, é um sistema composto de sensores, motores, bombas e demais componentes fielmente modelados virtualmente e conectados a um computador central, simulando as interações entre os componentes do sistema com o algoritmo.
Simulando operações reais nesses sistemas complexos, por exemplo, é possível modelar diversos componentes que compõem o motor do veículo com o uso de software e conectar essa simulação a um componente específico em desenvolvimento, como por exemplo uma nova ECU (Central Controladora Eletrônica), ou seja, a ECU é o hardware em teste e todos os demais componentes que precisam se conectar a ela para testes, são modelados em software.
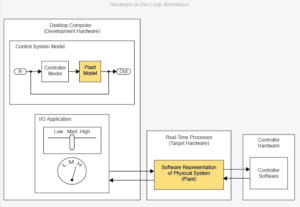
Fig. 2 – Simulação de Hardware-in-the-loop (HIL) – Fonte: Mathworks.
Mas afinal de contas, o que é o HIL? Já comentamos sobre algumas vantagens, mas o que é o sistema HIL em si?
Para responder a essa pergunta, precisamos, primeiramente, falar um pouco sobre outras técnicas que são utilizadas e compostas no processo de criação de hardware-in-the-loop. Falando sobre modelos de desenvolvimento de sistemas complexos, é importante explicar um pouco sobre o MBD (Model Based Design), que é frequentemente utilizado na indústria em aplicações automotivas e aeroespaciais.
O MBD possibilita que o processo de desenvolvimento do algoritmo seja constantemente verificado e testado, de modo a garantir que os requisitos estão sendo cumpridos, sejam eles o espaço de memória ocupado, tempo de processamento gasto ou velocidade de execução. Na maioria dos casos, avalia-se também o custo de desenvolvimento e o tempo gasto para implementação.
Nesse contexto, técnicas como MIL, SIL, PIL, HIL, rapid prototyping e validação de código podem ser facilmente adotadas, oferecendo uma enorme gama de possibilidades e funcionalidades para tornar o desenvolvimento uma tarefa mais confiável e menos demorada. Temos também uma definição mais genérica para testes MBD: são aqueles cujas especificações são derivadas inteiramente ou em parte de ambos os requisitos do sistema e o seu modelo, que descreve os aspectos funcionais e não funcionais da planta.
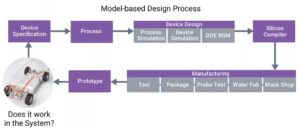
Fig. 3 – Model Based Design (MBD) – Fonte: Synopsys
Na definição citada acima, as duas palavras-chave que identificam o MBD são: requisitos e modelo. O engenheiro de controle começa a projetar o sistema de controle a partir dos requisitos que ele deve possuir, sejam eles requisitos de tempo de resposta, velocidade de execução, robustez, máximo sobressinal etc.
Depois de definidos os requisitos, deve-se gerar o modelo matemático do sistema que seja capaz de representar como ele se comporta sob diversas condições de operação. O modelo matemático deve ser o mais fiel possível, já que o conhecimento sobre sua dinâmica de operação é extraído do modelo matemático.
Uma característica muito importante da metodologia MBD, é que ela aceita o Modelo-V de desenvolvimento de software.
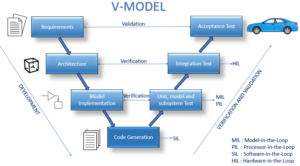
Fig. 4: Modelo-V de desenvolvimento de software. – Acesso em: Linkedin [https://www.linkedin.com/pulse/model-based-design-mbd-approach-shradha-jadhav/]
Neste modelo, o processo evolui da esquerda para direita e o nível de fidelidade e detalhe do sistema aumenta movendo-se de cima para baixo. No exemplo mostrado na Figura 4, vemos os termos MIL, SIL, PIL e HIL. Com base nisso, vamos detalhar melhor cada uma dessas etapas e mostrar suas aplicações em cada fase.
- Model-in-the-Loop
Na metodologia MBD, o Model-in-the-Loop é a primeira fase de desenvolvimento de um sistema. Nesse estágio, o modelo do sistema é construído e simulado em um ambiente virtual. Geralmente, usa-se um programa computacional que permite a modelagem matemática do sistema por diagrama de blocos, apresentando uma interface que permita a visualização gráfica da sua dinâmica e dos sinais envolvidos. É muito comum o uso de MIL em trabalhos acadêmicos quando se deseja estudar determinado sistema de controle sem o objetivo de implementá-lo na prática.
- Software-in-the-Loop
A segunda etapa do desenvolvimento na metodologia MBD, se chama SIL, que consiste em gerar código-fonte a partir da implementação do controlador e executar novamente a simulação com o código resultante, que normalmente é em linguagem C.
A característica do SIL é que se gere código C destinado a ser futuramente executado no hardware do controlador sem a necessidade de esse ter sido definido. Portanto, o código gerado executa na própria máquina que realiza a simulação.
A desvantagem dos testes SIL, é que o código gerado não é executado no hardware real do controlador, logo, a simulação está sujeita a mostrar um comportamento diferente do que se teria no controlador real. Em sistemas operacionais como o Windows, o usuário ainda está sujeito a atrasos e latência do sistema dependendo do número de aplicativos que executam no SO em conjunto com a simulação. Esse comportamento é o que se chama de resposta não determinística, e que não é desejada em sistemas de controle.
- Processor-in-the-Loop
Logo em seguida, chegamos no terceiro estágio do desenvolvimento, o processor-in-the-loop ou PIL. Nesse teste, deve-se definir qual hardware será usado para controlar a planta no sistema real. Isso é necessário, pois no PIL gera-se código para ser executado no processador. A finalidade é verificar se o processador escolhido é adequado ao projeto de controle desenvolvido. Deve se levar em conta a velocidade que o processador efetua os cálculos do modelo e analisa os erros envolvidos.
De posse do sinal gerado na simulação SIL e PIL, pode-se novamente compará-las a fim de se detectar qualquer discrepância ou falha no sistema. A vantagem de realizar testes PIL é que já é possível acessar os recursos de software como domínio do tempo, consumo de memória etc.
A desvantagem é que os sinais de hardware, como os sensores e atuadores, ainda não estão disponíveis para teste. O mesmo algoritmo de solução utilizado no teste SIL pode ser utilizado no teste PIL verificando-se, apenas, se o processador escolhido consegue operar em uma frequência correspondente ao passo fixo escolhido. Assim como acontece no teste SIL, o modelo gerado no software de simulação ainda não opera em tempo real, sendo que ainda está sujeito a variações do sistema operacional utilizado.
- Hardware-in-the-Loop
Finalmente, chegamos no quarto estágio. Nessa etapa, é feita uma integração em hardware, que é o HIL, propriamente dito.
Como comentamos, no começo do texto, o HIL é uma técnica que permite a simulação de sistemas complexos em um ambiente de teste controlado. O fator principal, na utilização dessa tecnologia está na integração entre hardware real e um simulador computacional em tempo real.
O hardware real, que geralmente inclui controladores eletrônicos, sensores e atuadores, é conectado ao simulador (HIL). O software de simulação gera entradas para o hardware em tempo real, e o hardware, por sua vez, gera respostas que são lidas pelo software. Dessa forma, cria-se um ciclo de feedback em tempo real que permite que os engenheiros testem e validem o desempenho do sistema, antes de sua implementação no mundo real.

Fig. 5 – Sistema de hardware-in-the-loop (HIL) – Fonte: MathWorks.
A crescente complexidade dos sistemas de controle e a necessidade de testá-los de forma abrangente e segura, foram fatores cruciais no desenvolvimento do HIL. Podemos listar, alguns dos principais motivos, que tornam o HIL tão essencial:
- Complexidade crescente: À medida que os sistemas de controle se tornaram mais sofisticados, tornou-se inviável realizar testes apenas em protótipos físicos, devido ao alto custo e a à falta de flexibilidade.
- Segurança: Em indústrias como a automotiva e aeroespacial, a segurança é de suma importância. O HIL permite a detecção precoce de problemas sem riscos para a segurança.
- Ciclos de Desenvolvimento mais curtos: O HIL acelera o desenvolvimento de sistemas, permitindo testes simultâneos com outras partes do projeto, como software, sem esperar por protótipos físicos.
Antes, de explorarmos melhor, como o HIL é utilizado para validar um veículo. Primeiro, precisamos ter uma noção de quantos sistemas complexos em um veículo temos para validar.
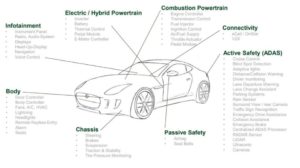
Fig. 6 – Sistemas que compõem um veículo atualmente – Fonte: NI.
A Figura 4, nos dá uma ideia da quantidade de sistemas que precisam ser validados, e para isso, diversas simulações precisam ser feitas. Por isso a técnica do HIL é tão importante, com ela é possível validar esses sistemas em ambientes de simulação virtuais, junto com hardwares reais, de forma a tornar o ambiente de simulação o mais próximo possível do mundo real.
- Vantagens
É possível listar diversas vantagens, para essa técnica como por exemplo: antecipação das etapas de validação durante o desenvolvimento, simulação de ambientes difíceis de replicar, ambiente controlado, repetitividade, replicar diversas vezes o modo falha e simular falhas, verossimilhança, segurança para o operador e reaproveitamento dos modelos de MIL.
A partir do que foi citado, é possível ver que utilizando HIL o produto em desenvolvimento não precisa estar pronto, se economiza muito com protótipos, a empresa não precisa de um laboratório ou um campo de provas para fazer testes em fases iniciais de desenvolvimento. Os ensaios destrutivos se tornam desnecessários ou cenários algumas vezes impraticáveis, como fazer nevar num campo de provas no Brasil, por exemplo.
Além de que, situações de teste também podem ser potencialmente perigosas para seres humanos. Por exemplo, certas condições de voo para testes de aeronaves supersônicas, são muito arriscadas para qualquer piloto experiente.
Protótipos em sua fase inicial de construção também apresentam altos riscos já que, a fase de dimensionamento dos componentes pode não ter sido concluída e muitos ajustes ainda são necessários. Em tais situações, não se pode arriscar a integridade de um ser humano em prol de se testar uma máquina. É também nesses casos, que a simulação HIL se torna quase obrigatória.
Também é possível falar sobre a possibilidade que diversos engenheiros trabalhem em conjunto com outras equipes, já que têm em mãos resultados provenientes de simulação e não precisam esperar a confecção de um protótipo.
Podemos dar um exemplo prático de um teste que pode ser realizado. Uma frota que possui 100 veículos, rodando 24 horas por dia, nos 365 dias do ano à uma velocidade de 40 km/h, necessitaria de 17 bilhões de quilômetros dirigidos de testes e 518 anos para validar completamente os softwares com 95% de confidência tal que, a taxa de falha seria 20% melhor do que a atual taxa de mortalidade de motoristas. Imagine a economia de tempo e recursos, para validar todos os sistemas de um carro hoje em dia, utilizando o HIL.
Abaixo, temos alguns impactos positivos no desempenho de negócios de algumas empresas que adotaram o HIL como solução de acordo com a NI.
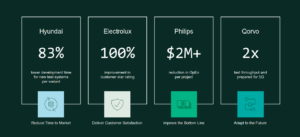
Fig. 07 – Resultados de empresas após adotar HIL nos seus processos – Fonte NI.
Atualmente, a necessidade de se adequar à nova tecnologia tem aumentado significativamente, uma vez que, ao contrário do que acontecia no passado, cerca de 45% do orçamento para o desenvolvimento de um veículo é destinado ao desenvolvimento de software. A demanda por veículos que dependem de software tende a aumentar. Abaixo, temos algumas expectativas para o setor automotivo nos próximos anos.
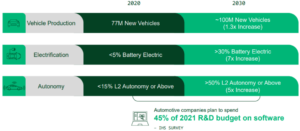
Fig. 08 – Projeção do mercado automobilístico para os próximos anos – Fonte: NI.
- Desafios
O HIL, como mencionado, está associado a um processo de desenvolvimento mais moderno e eficaz; no entanto, enfrenta certos desafios em sua expansão dentro do setor automotivo. Entre esses desafios, destaca-se o alto custo de aquisição de equipamentos. Atualmente, para estabelecer um laboratório no Brasil para validação com HIL, é necessário um alto investimento inicial.
Outro desafio nacional enfrentado é a dificuldade de encontrar mão de obra qualificada. Os sistemas estão se tornando cada vez mais complexos, e à medida que isso ocorre, as configurações de sistemas HIL podem se tornar igualmente complicadas. Engenheiros especialistas em HIL são recursos escassos no Brasil, e muitas vezes aqueles que se especializam nessa área são logo recrutados por empresas no exterior para trabalhar.
- Conclusão
Com tudo que foi apresentado, foi possível destacar a importância de sistemas HIL para validação automotiva e desenvolvimento de sistemas nesse setor, mas também ficou claro alguns desafios para as empresas que querem investir em HIL aqui no Brasil. O principal é, o alto valor em investimento em equipamentos para montar os ambientes para validação em HIL.
Considerando as tecnologias atuais, como carros elétricos, os valores podem passar de 5 milhões de reais. Outro problema que enfrentamos é a falta de profissionais capacitados em HIL, não é fácil encontrar no mercado especialistas em sistemas HIL para desenvolver e modelar os testes, os poucos que aparecem logo são atraídos para o mercado de trabalho no exterior.
Outro ponto importante é que no Brasil pouco se desenvolve na área automobilística, e isso dificulta bastante o interesse em HIL aqui. Uma vez que a indústria automobilística concentra seus desenvolvimentos nos HQ’s no exterior, aqui no Brasil assumimos o papel apenas de produção, com toda tecnologia chegando pronta para as fabricas, com isso o investimento em HIL aqui se torna desnecessário já que seu uso é voltado mais para desenvolvimento de ECU’s e sistemas.
Uma saída para a mudança desse cenário atual, é o investimento em capacitação de profissionais atrelado a parcerias com institutos de pesquisa, de modo a tornar o Brasil um país mais atrativo para o desenvolvimento de tecnologias da indústria automobilística.
Bibliografia
- (55) Hardware in the Loop (HIL) Test System – YouTube
- Hardware-in-the-Loop (HIL) testing – The best of two worlds
- O que é Hardware-In-the-Loop (HIL)? – OPENCADD
- Aerospace and Defense – NI
- TATA Motors Builds HIL Test System for Hybrid Vehicle Simulation Using NI Tools – NI
- CarSim Overview
- Hardware-in-the-Loop (HIL) with VehicleSim
- dSpace – Scalexio
- Hardware-in-the-Loop – Ohmni
- Hybrid Simulation Solutions – MTS
- MTS Automotive Hybrid Simulation Solutions
- Home | Vector
- IRENO, Thiago. Aplicação da Metodologia MODEL-BASED DESIGN no Projeto e Teste de Sistemas de Controle. 2014. Monografia de Graduação – Engenharia de Controle e Automação – Universidade Federal de Ouro Preto, Minas Gerais, 2014.
- Hardware-in-the-Loop (HIL) – MATLAB & Simulink (mathworks.com)
- Especial – Como é feito um carro: Este “Frankenstein” virou o Nissan Kicks (uol.com.br)
- Feito “à mão”, protótipo como o da nova Montana custa o triplo de um Camaro | Mobiauto
- What is Model-Based Desing?-Synopsys
Revisado por Samuel Polla.